|
||||
 |
||||
Способы преобразования чертежа применяются для приведения геометрических объектов в частное положение относительно плоскостей проекций, что позволяет упростить решение ряда позиционных и метрических задач. Способы преобразования чертежа можно разделить на две группы: 1. Способы дополнительного проецирования. Эти способы основаны на введение дополнительных плоскостей проекций и центров проецирования. При этом положение геометрических объектов по отношению к исходным плоскостям проекций π1 и π2 остается неизменным. 2. Способы перемещения или вращения геометрических объектов. Эти способы основаны на изменении положения геометрических объектов по отношению к исходным плоскостям проекций π1 и π2. В этой части курса будем рассматривать только один из первой группы способов преобразования чертежа – способ дополнительного ортогонального проецирования. |
|
|||
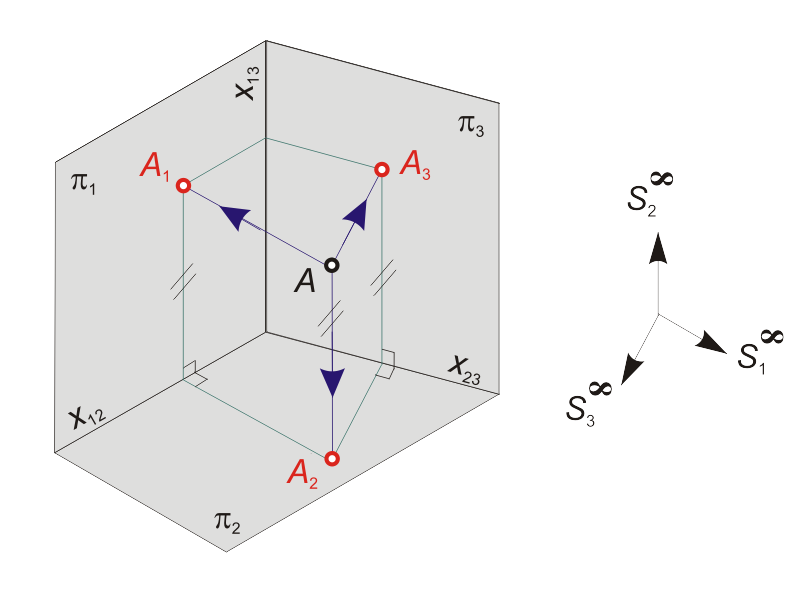
Возьмем в пространстве дополнительную плоскость π3 перпендикулярную плоскости π2 (π3 ⊥ π2) и составляющую с плоскостью π1 произвольный угол φ. Проецирование на плоскость π3 из несобственного центра S3∞ выберем ортогональным (аналогично проецированию на плоскости π1 и π2 из соответствующих центров S1∞ и S2∞) (рис. 3.1). Для построения проекции A3 произвольной точки А исходного пространства выполним следующие операции: 1. Через центр S3∞ и точку А проведем прямую a; 2. Отметим точку пересечения прямой a с плоскостью π3: A3=a ∩ π3. Полученная точка A3 будет называться дополнительной ортогональной проекцией точки А на плоскость π3 из центра S3∞. |
Рис. 3.1 |
|||
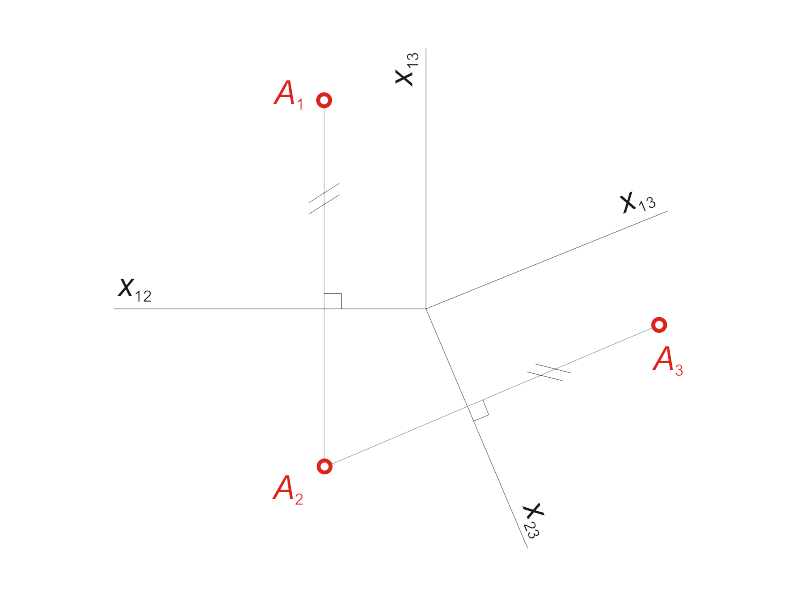
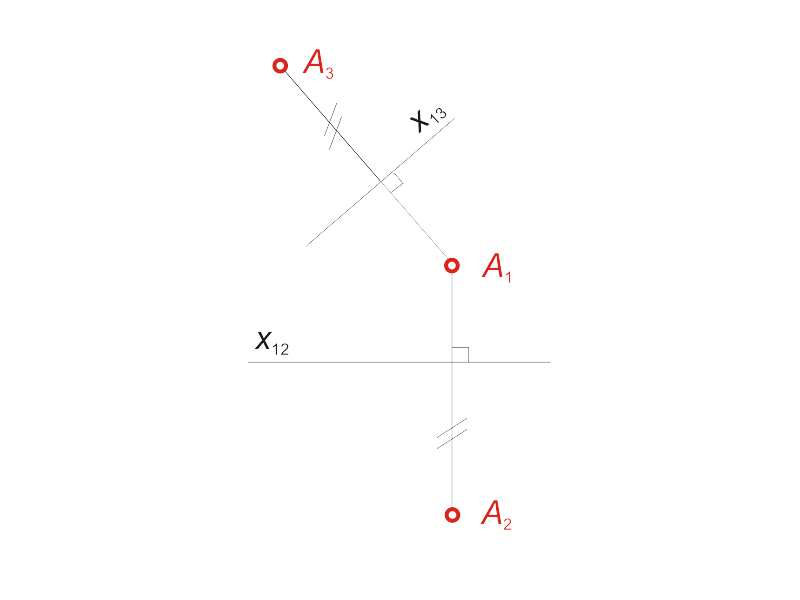
Из рисунка 3.1 видно, что расстояние от точки A до плоскости π2 равно расстоянию от точки А1 до оси x12, а также расстоянию от точки А3 до оси x23: | A , π2| = | A1, x12| = | A3, x13|. Для перехода к плоской модели повернем плоскость π3 вокруг оси x23 до совмещения с плоскостью π2, а затем - плоскость π2 вокруг оси x12 до совмещения с плоскостью π1. Положение проекции А3 точки А на плоской модели определим следующим образом: - из точки А2 проведем линию связи перпендикулярно оси x23 (рис.3.2); - измерим расстояние от проекции А1 до оси x12 и отложим это значение по линии связи от оси x23 . Если взять дополнительную плоскость π3 перпендикулярно плоскости π1, то в этом случае положение проекции А3 на плоской модели определится следующим образом: - из точки А1 проведем линию связи перпендикулярно прямой x13 (рис.3.3); - измерим расстояние от проекции А2 до оси x12 и отложим это значение по линии связи от оси x13 . |
Рис. 3.2
Рис. 3.3 |
|||
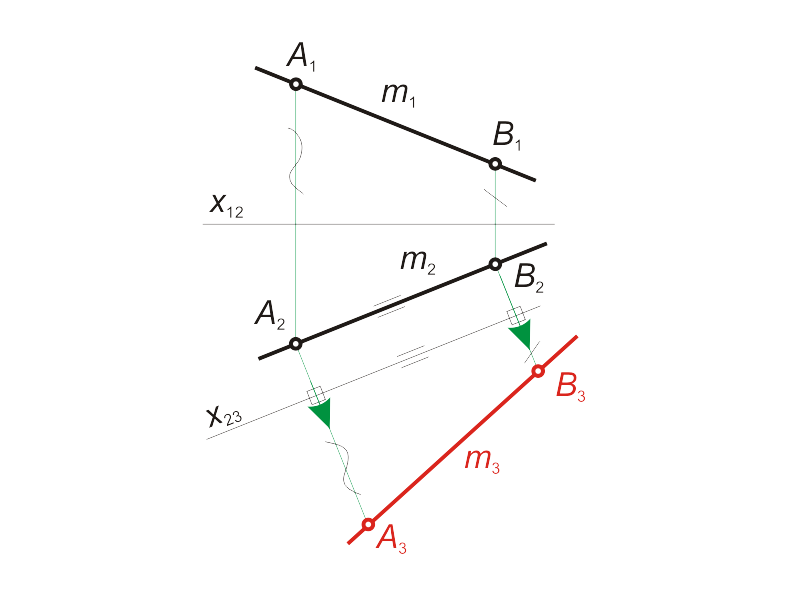
Рассмотрим ряд задач, связанных с приведением геометрических объектов в частное положение относительно плоскостей проекций и определением некоторых метрических характеристик этих объектов способом ДОП. Задача 3.1. Преобразовать прямую общего положения (m) в прямую уровня. Для решения этой задачи дополнительная плоскость проекций π3 выбирается параллельно прямой m и перпендикулярно одной из плоскостей проекций. Если π3 ⊥ π2, то на плоской модели ось x23 будет параллельна m2 (x23 || m2) (рис. 3.4). |
Рис. 3.4 |
|||
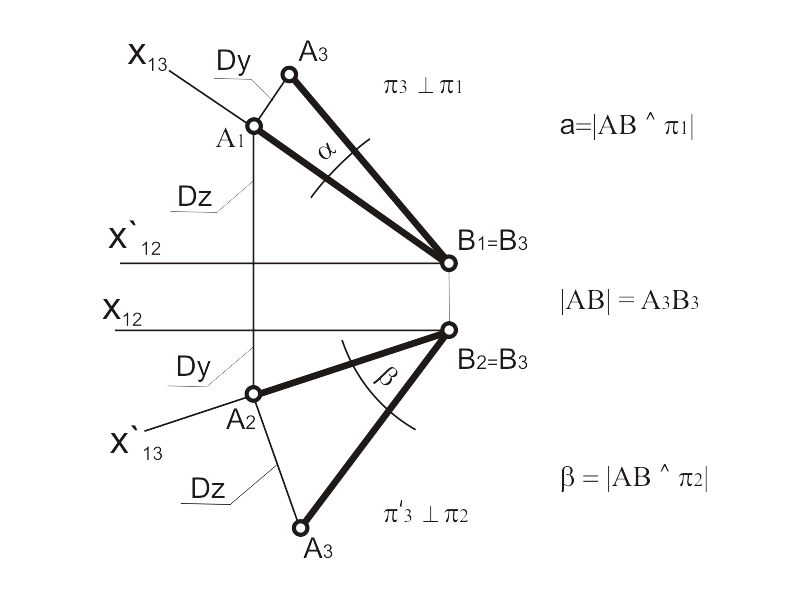
Алгоритм решения 1. Проведем ось x23 параллельно проекции m2 на произвольном расстоянии от нее. 2. Отметим на прямой m две точки - точки A(A1- A2) и B(B1- B2). 3. Определим проекции A3, B3 точек A и B в дополнительном поле проекций π3 в соответствии с рис. 3.2. В новой системе плоскостей (π2-π3) прямая m(m2-m3) преобразовалась в линию уровня. Используя это преобразование можно измерить длину отрезка AB, а также углы между отрезком и плоскостями проекций (рис. 3.5). |
Рис. 3.5 |
|||
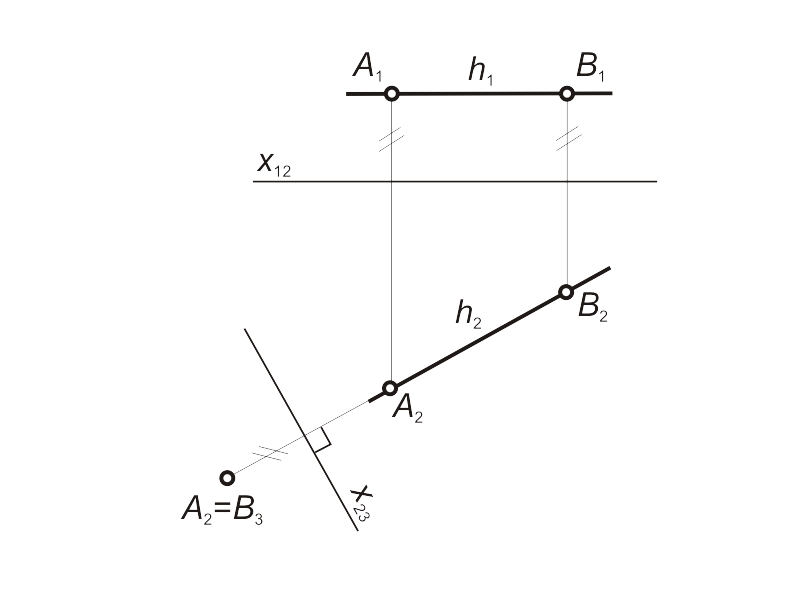
Задача 3.2. Преобразовать прямую уровня (h) в проецирующую прямую (рис. 3.6). Для решения этой задачи дополнительная плоскость π3 выбирается перпендикулярно прямой. Так как по условию задачи прямая h параллельна плоскости π2, очевидно, что плоскость π3 будет перпендикулярна горизонтальной плоскости проекций, а на плоской модели ось x23 - перпендикулярна h2. |
Рис. 3.6 |
|||
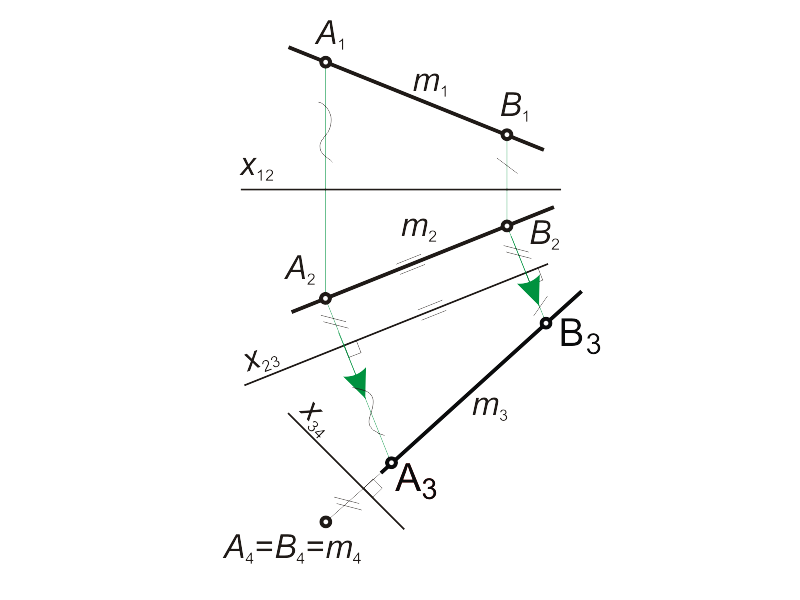
Алгоритм решения 1. Проведем ось x23 перпендикулярно проекции h2 . 2. Отметим на прямой h две точки - точки A(A1- A2) и B(B1- B2). 3. Определим проекции A3, B3 точек A и B в дополнительном поле проекций π3 в соответствии с рис. 3.2 . В новой системе плоскостей (π2-π3 ) прямая h(h2-h3) преобразовалась в проецирующую прямую. Преобразование прямой общего положения в проецирующую прямую осуществляется в два этапа. На первом этапе прямая общего положения преобразуется в прямую уровня (задача 3.1). Затем, при введении еще одной дополнительной плоскости - π4, прямая уровня преобразуется в проецирующую прямую (задача 3.2). На рис. 3.7 приведен пример преобразования прямой общего положения (m) в проецирующую. |
Рис. 3.7 |
|||
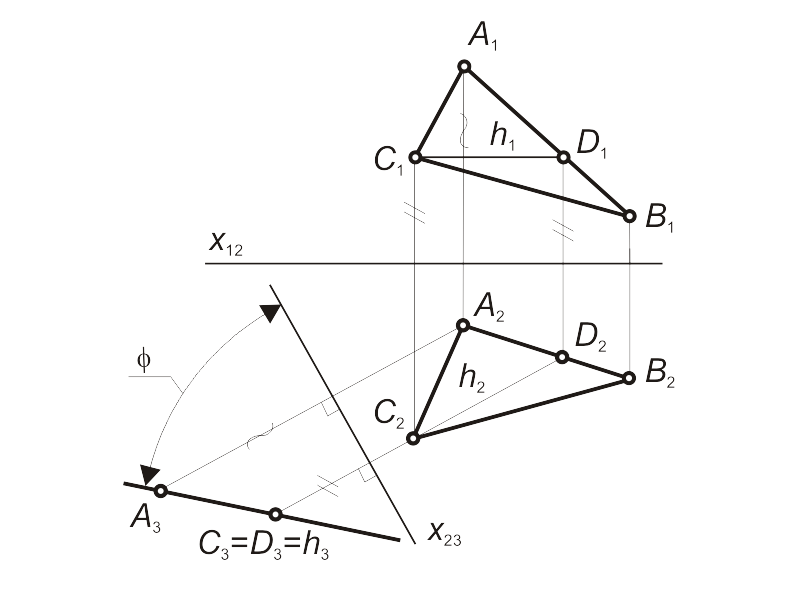
Для построения проекций точек в поле π4 расстояния измеряем в поле проекций π2 (от точек A2, B2 до оси x23) и откладываем в поле π4 от оси x34 по линии проекционной связи, перпендикулярной x34. Задача 3.3. Преобразовать плоскость α(А, В, С) общего положения в проецирующую. Исходя из определения проецирующей плоскости, дополнительная плоскость проекций π3 должна быть перпендикулярна прямой, принадлежащей этой плоскости. Учитывая, что дополнительная плоскость перпендикулярна π1 или π2, - π3 выберем перпендикулярной одной из фронтали или горизонтали плоскости α соответственно. Возьмем π3 перпендикулярно горизонтали h плоскости α. Очевидно, что при этом плоскость π3 будет перпендикулярна горизонтальной плоскости проекций, а на плоской модели ось x23 - перпендикулярна h2 (рис. 3.8). Алгоритм решения 1. Построим горизонталь h (h1- h2) плоскости α(А, В, С). 2. Проведем ось x23 перпендикулярно проекции h2 . 3. Определим проекции горизонтали h и точки A в дополнительном поле проекций π3 – совпавшие проекции С3, D3 и проекция A3. 4. Через точки A3 и С3(D3) проведем прямую (α3) - вырожденную проекцию плоскости α. |
Рис. 3.8 |
|||
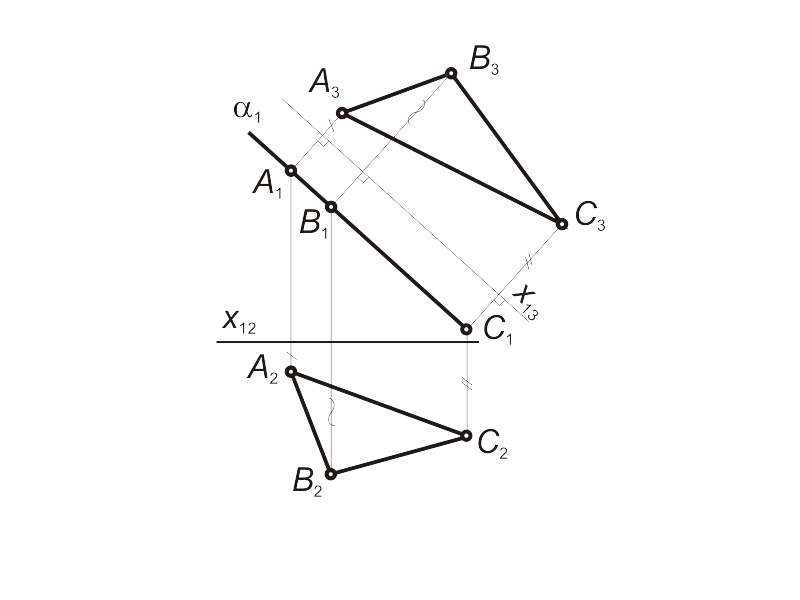
В новой системе плоскостей (π2-π3) плоскость a преобразовалась в проецирующую плоскость. Используя это преобразование можно измерить угол (φ) между плоскостью общего положения (α) и плоскостью проекций π2. Для определения угла между плоскостью общего положения и плоскостью π1 дополнительную плоскость π3 нужно задать перпендикулярно фронтали плоскости α и выполнить аналогичные преобразования. Задача 3.4. Преобразовать проецирующую плоскость α(А, В, С) в плоскость уровня. Исходя из определения плоскости уровня, дополнительная плоскость проекций π3 должна быть параллельна плоскости α. Так как плоскость α по условию задачи является фронтально-проецирующей (рис. 3.9), очевидно, что плоскость π3 будет перпендикулярна фронтальной плоскости проекций, а на плоской модели ось x13 - параллельна α1 . |
Рис. 3.9 |
|||
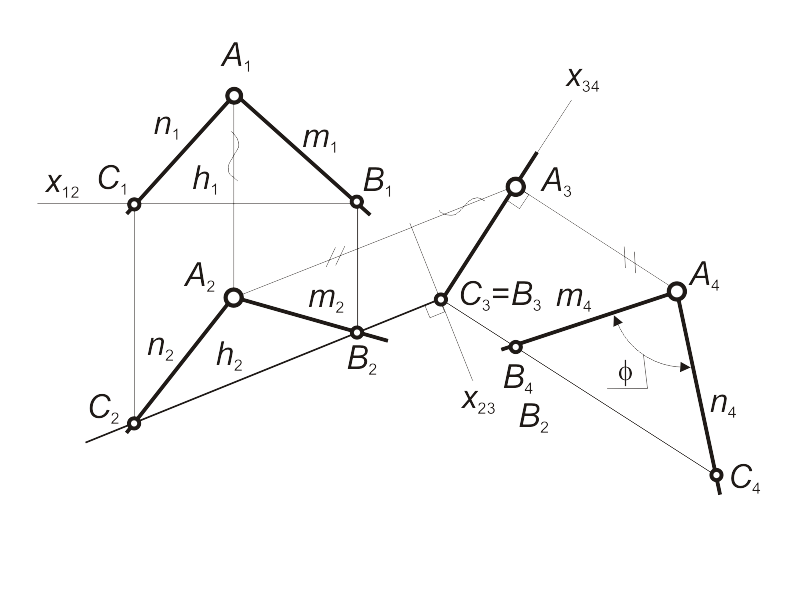
Алгоритм решения 1. Проведем ось x13 параллельно проекции α1 на произвольном расстоянии от нее. 2. Определим проекции A3, B3 и С3 точек A, B и С в дополнительном поле проекций π3 в соответствии с рис. 3.3. В новой системе плоскостей (π1-π3) плоскость a преобразовалась в плоскость уровня. По проекции треугольника в поле π3 можно определить все его метрические характеристики. Это преобразование используется в практике черчения для построения натуральной величины наклонного сечения детали. Преобразование плоскости общего положения в плоскость уровня осуществляется в два этапа. На первом этапе плоскость общего положения преобразуется в проецирующую (задача 3.3). Затем, при введении еще одной дополнительной плоскости - π4, проецирующая плоскость преобразуется в плоскость уровня (задача 3.4). На рис. 3.10 приведен пример преобразования плоскости общего положения в плоскость уровня. Используя это преобразование можно определить угол между пересекающимися прямыми m и n. |
Рис. 3.10 |
|||
Если плоскость общего положения будет задана некоторой фигурой α(А, В, С, E, D) (рис. 3.11), то подобное преобразование позволит определить размеры и форму плоской фигуры. |
Рис. 3.11 |
|||
| Лекция 9 | ||||