|
||||
 |
||||
Для построения линии пересечения поверхностей будем использовать следующие способы: 1. Алгоритм построения линии принадлежащей поверхности. 2. Способ вспомогательных секущих плоскостей. 3. Способ вспомогательных концентрических сфер. |
|
|||
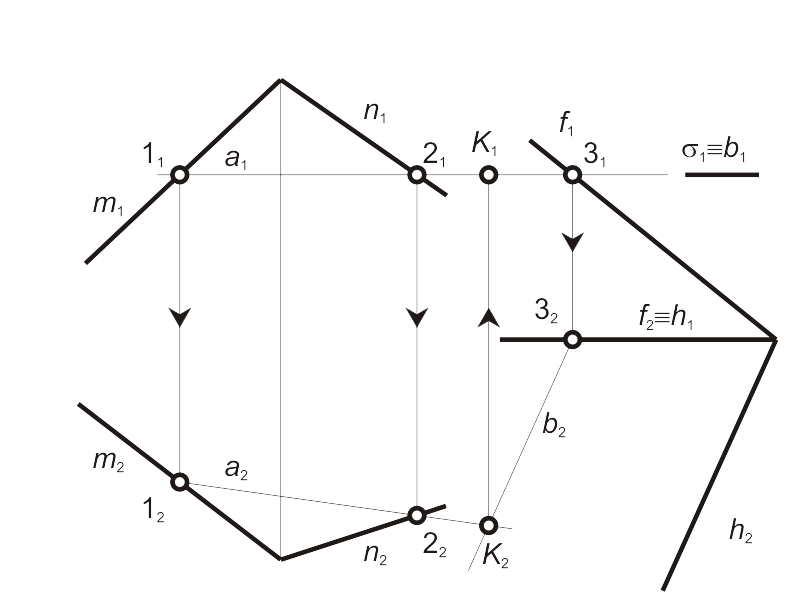
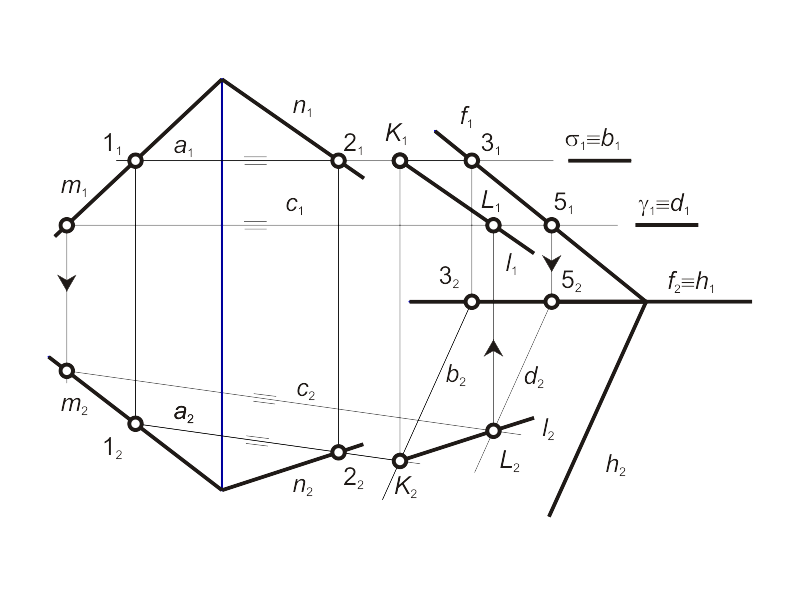
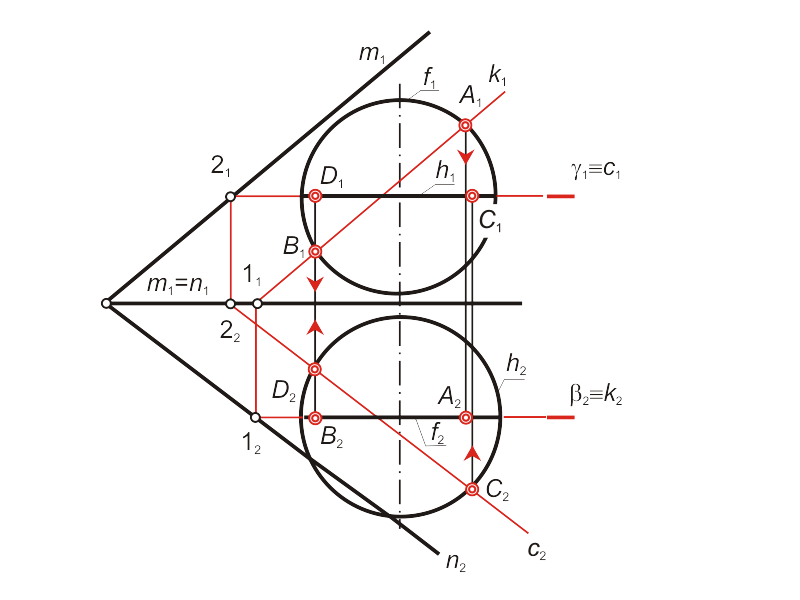
Этот способ используется в том случае, если одна из двух заданных поверхностей – проецирующая. Для определения линии пересечения поверхностей будем использовать собирательное свойство проецирующей поверхности. Задача. Построить проекции линии пересечения l проецирующей призматической поверхности Φ (f, S) с поверхностью общего положения Γ (i, m) (рис. 2.16). Алгоритм решения 1. Так как призматическая поверхность Φ (f, S) - горизонтально-проецирующая, то вторая проекция линии пересечения поверхностей будет совпадать с вырожденной горизонтальной проекцией поверхности Φ. Отмечаем горизонтальную проекцию l2 ≡ Φ2 ≡ f2. 2. Фронтальную проекцию l1 определяем из условия принадлежности линии l поверхности Γ (i, m). Задача. Построить проекции линии пересечения l проецирующей цилиндрической поверхности Φ (f, S) с торовой поверхностью Γ (i, m) (рис. 2.17). Алгоритм решения 1. Так как поверхность Φ (f, S) - фронтально-проецирующая, то первая проекция линии пересечения поверхностей будет совпадать с вырожденной фронтальной проекцией поверхности Φ. Отмечаем фронтальную проекцию l1 ≡ Φ1 ≡ f1 . 2. Горизонтальную проекцию l2 определяем из условия принадлежности линии l поверхности тора - Γ (i, m). |
Рис. 2.16
Рис. 2.17 |
|||
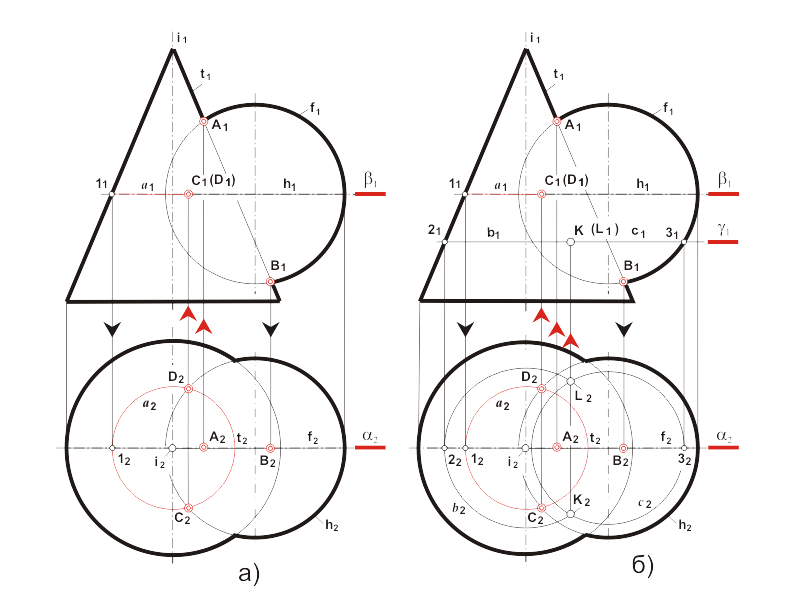
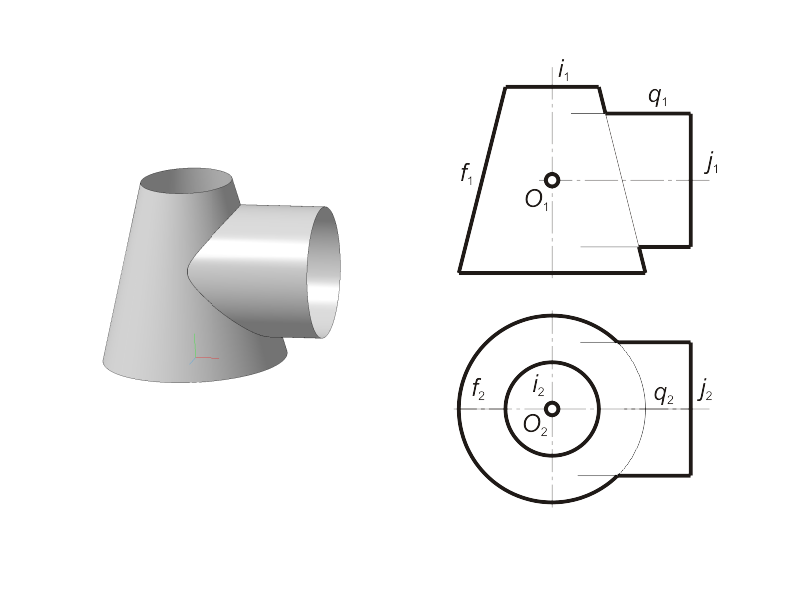
Этот способ рационально применять тогда, когда есть возможность пересечь обе поверхности плоскостью по графически простым линиям (прямым, окружностям).
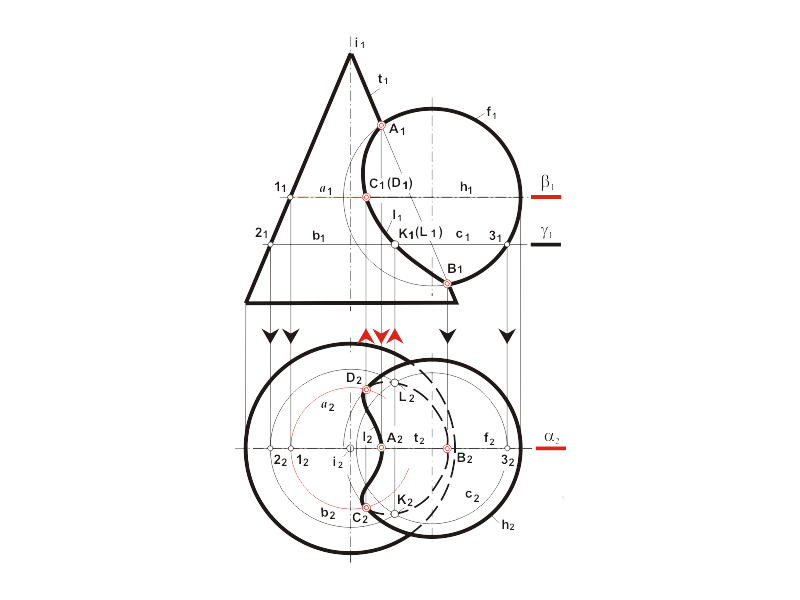
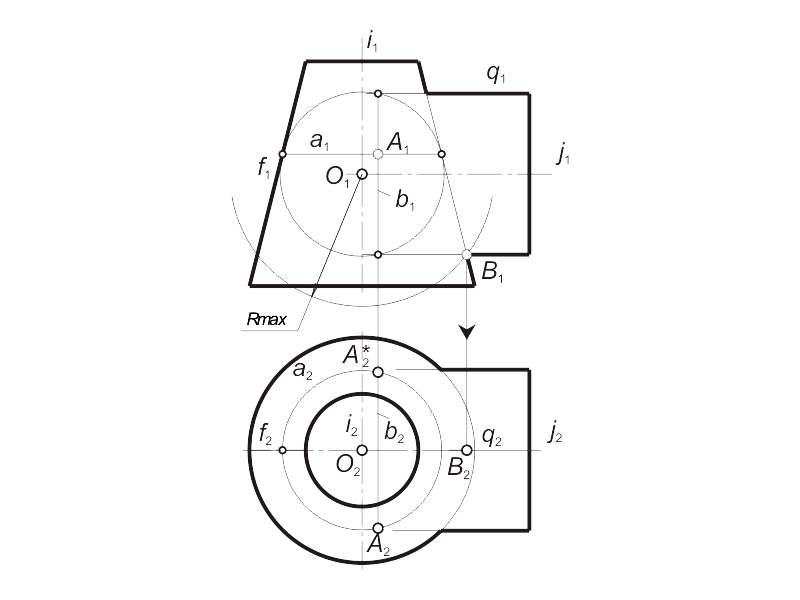
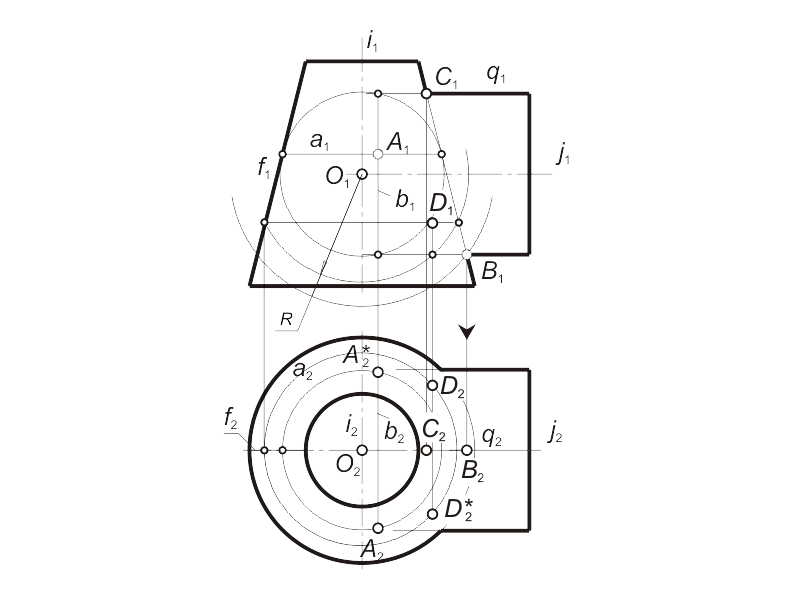
При проецировании на плоскость π1 видимая и невидимая часть линии l будут совпадать. При проецировании на плоскость π2 видимость линии можно определить, например, по положению точки A. Точка A будет принадлежать видимой части сферы, следовательно, часть линии l от точки C до точки D, содержащая точку A будет видимой. В поле проекций π2 этот участок (C2, A2, D2) отмечен сплошной основной линией (рис. 2.23). |
Рис. 2.18
Рис. 2.19 а
Рис. 2.19 б
Рис. 2.20
Рис. 2.21
Рис. 2.22
Рис. 2.23 |
|||
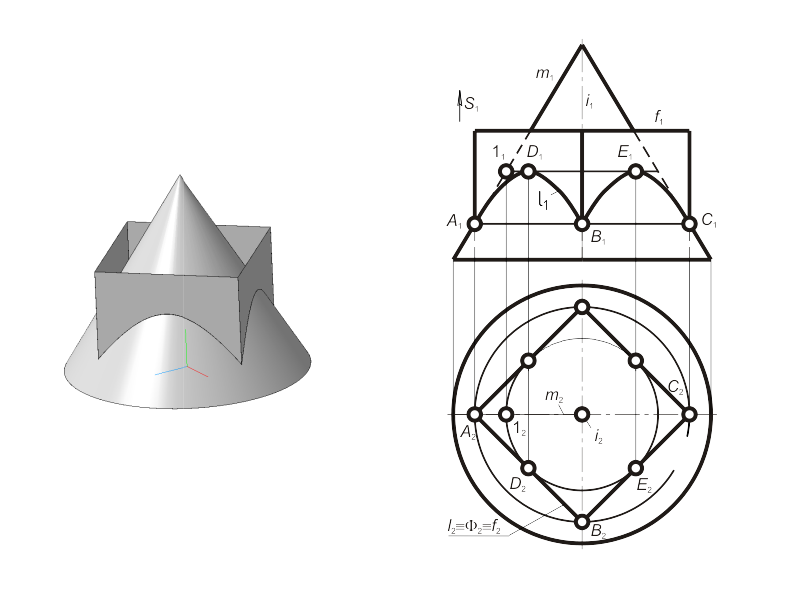
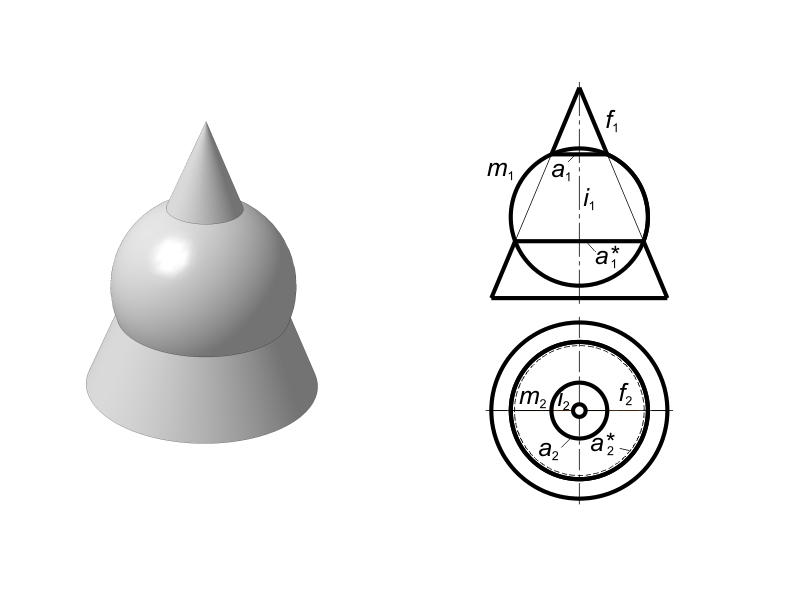
Этот способ можно применять только для определения линии пересечения поверхностей вращения, оси вращения которых пересекаются, и поверхности имеют общую плоскость симметрии. Способ сфер основан на следующем определении: две соосные поверхности вращения пересекаются по окружностям, плоскости которых перпендикулярны оси вращения (рис 2.24). |
Рис. 2.24
Рис. 2.25
Рис. 2.26
Рис. 2.27
Рис. 2.28
Рис. 2.29 |
|||
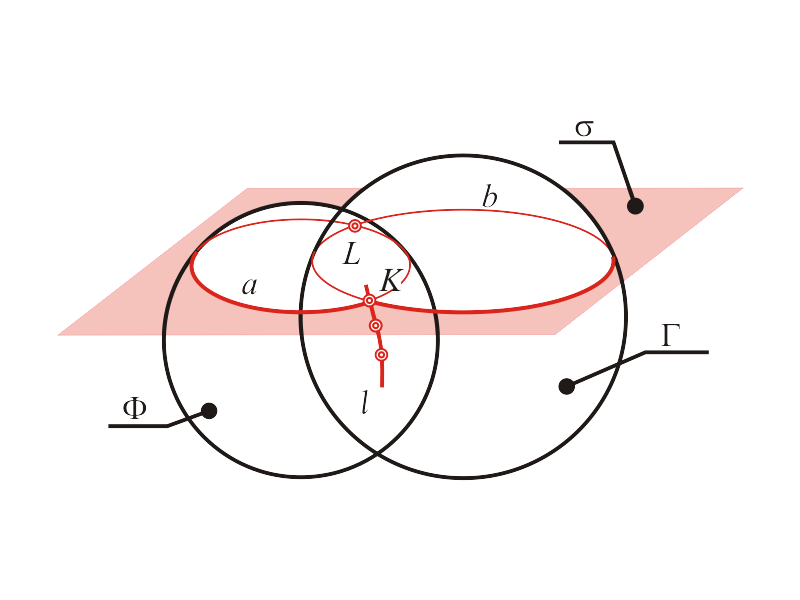
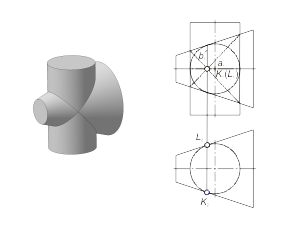
К поверхностям второго порядка относятся линейчатые поверхности вращения, а также поверхности, образованные вращением кривой второго порядка вокруг оси симметрии этой кривой. Теорема Монжа Если две поверхности второго порядка вписаны в третью поверхность второго порядка или описаны вокруг нее, то линия их пересечения распадается на две кривые второго порядка. На рис.2.30 изображены цилиндрическая и коническая поверхности вращения, описанные вокруг сферы. Цилиндрическая и коническая поверхности касаются сферы по окружностям a и b, которые пересекаются в точках K и L. Через эти точки и будут проходить линии пересечения рассматриваемых поверхностей. |
Рис. 2.30 |
|||